

 联系我们
联系我们

三、EtherCat通讯配置(DeviceNet通讯时忽略此步骤)
电脑连接库卡机器人控制柜,打开机器人工程,并激活控制器(注意:配置前将机器人工程备份好)。
1、激活后控制系统后面会显示“激活的控制”,点击“总线结构”前面的+,会显示系统当前存在的总线;
2、EtherCat通讯配置:
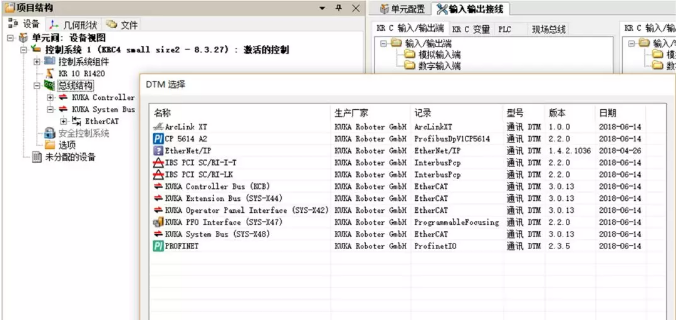
选择“总线结构”,右键选择添加,弹出DTM选择对话框,选择KUKA ExtensionBus(SYS-X44);
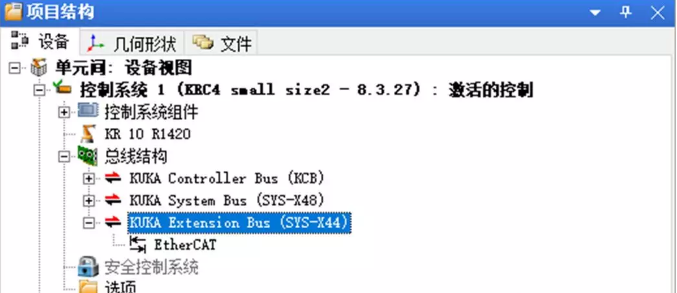
成功添加后,KUKA ExtensionBus(SYs-X44)将出现在总线结构下。
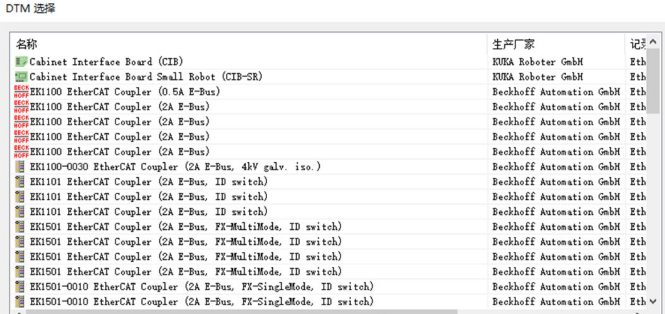
添加EK1100模块:右键单击KUKA ExtensionBus(Sys-X44),选择Add,弹出DTM选择对话框。选择EK1100 EtherCatCoupler (2AE-Bus) (EK1100 EtherCatCoupler (2AE-Bus)很多,选择第1个)。;

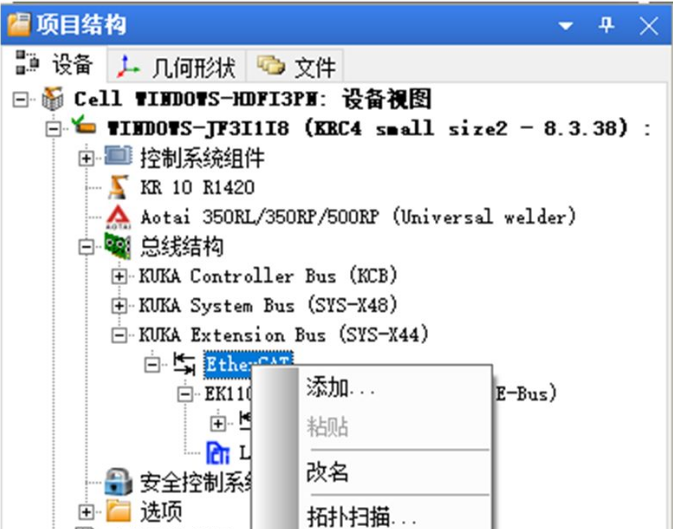
添加通用EtherCat通讯模块:点击总线结构下的KUKA ExtensionBus,选中下面的EtherCat,右键点击,选择添加;
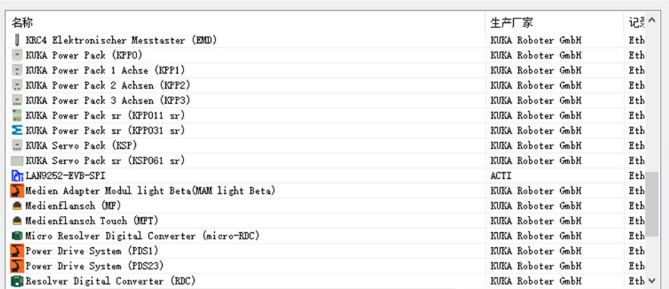
在DTM选择对话框中选择LAN9252-EVB-SPI;
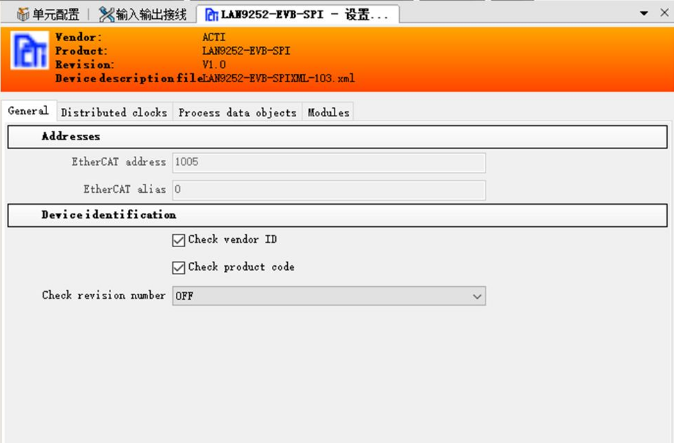
双击项目结构中的lan9252-EVB-SPI,查看EtherCat模块添加是否成功。
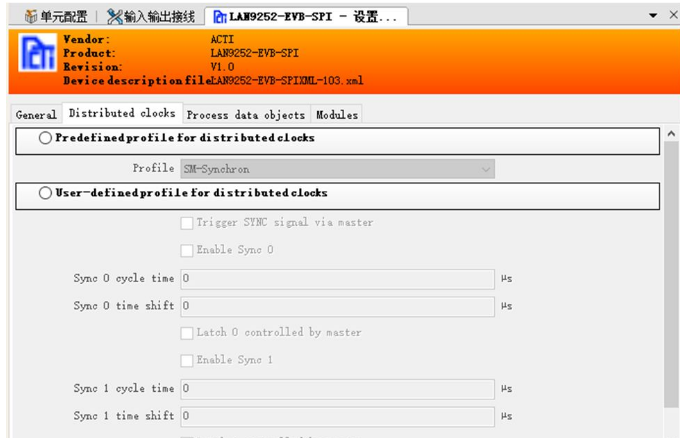
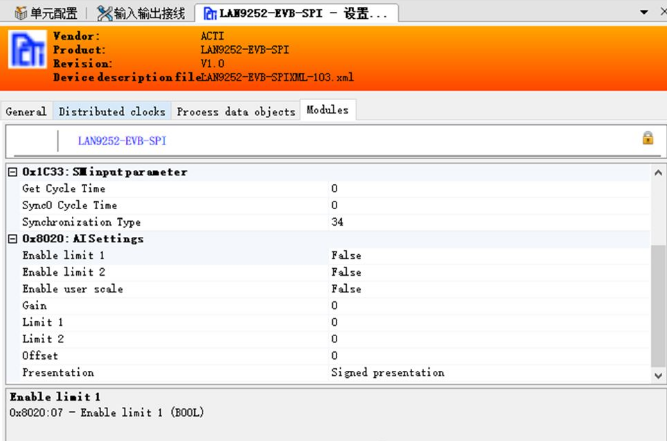
在右侧打开LAN9252-EVB-SPI设置界面。分别单击General、Dsitributedclocks、处理数据对象和模块。如果每个选项都能打开,则表示EtherCat通信模块已经成功添加,设备规范文件没有丢失。(只需打开接口,不修改接口中的任何选项)

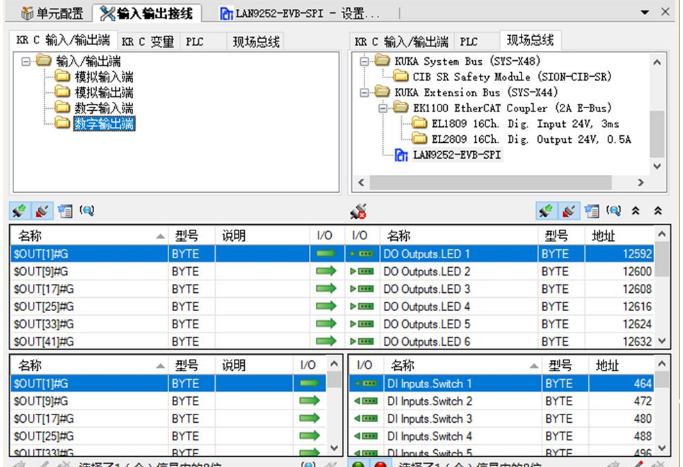
3、EtherCat模块信号链接:
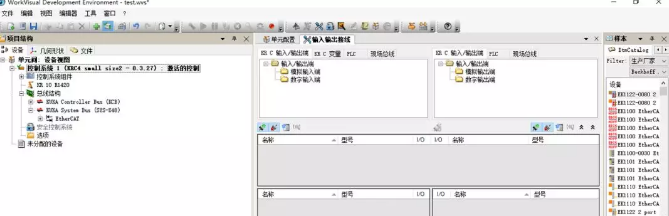
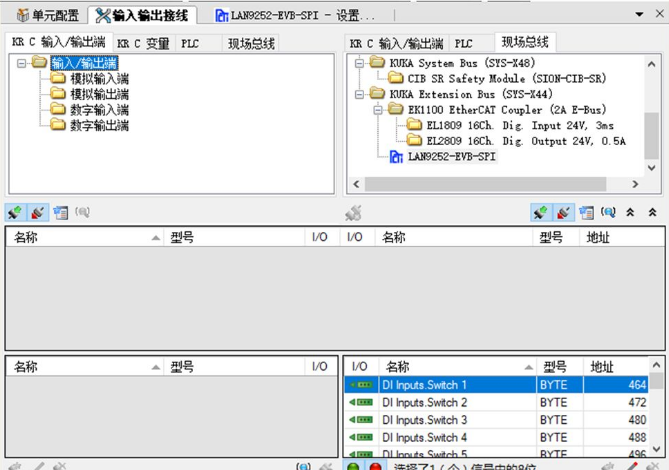
输入信号与数字输入端链接:右侧现场总线点击LAN9252-EVB-SPI,左侧点击数字输入端,下面的界面会显示相应的信号,如下图:
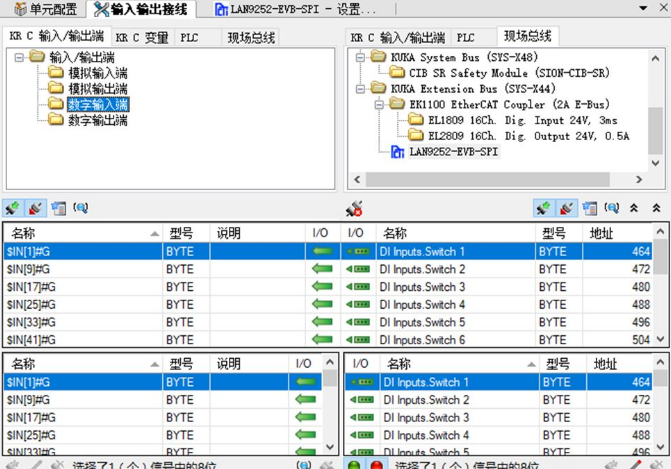
在链接之前,应该在[1]中选择左侧的输入信号。在右边,从输入开关1开始,按住SHIFT键,选择所有输入0到输入12。在[1]中右键点击,点击连续链接,弹出提示信息,如下图所示。
输出信号与数字输出端链接:链接方法同上;
四 弧焊软件配置
添加弧焊软件包:弧焊软件包添加的顺序是有要求的,必须先添加ArcTecBasic,再添加Universal welder;
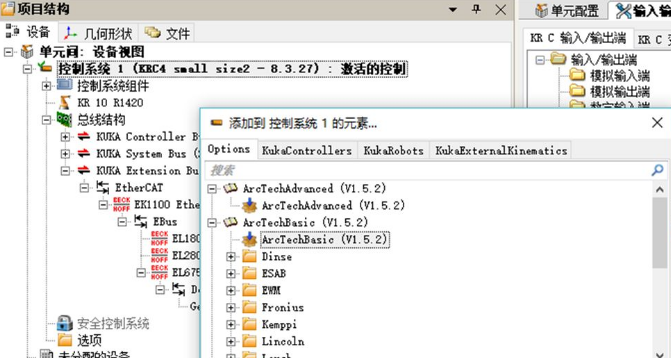
添加ArcTecBasic:选择控制系统,右键点击,选择添加,选择ArcTecBasic,弹出提示信息,点击确认;

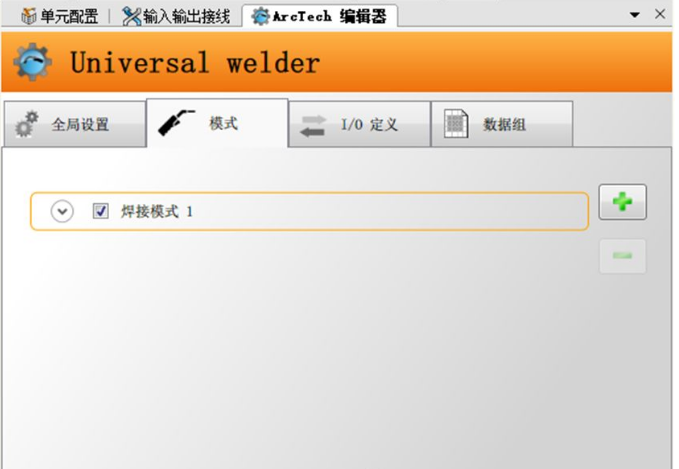
添加通用型弧焊软件包Universal welder:选择控制系统,右键点击,选择添加,选择Universal welder,点击确认;导入成功后,双击Universal welder,右侧会弹出ArcTech编辑器界面

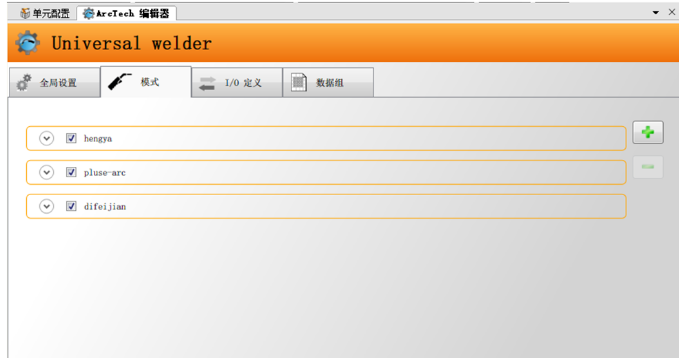
编辑焊接软件:点击下拉箭头,出现编辑界面,如下:

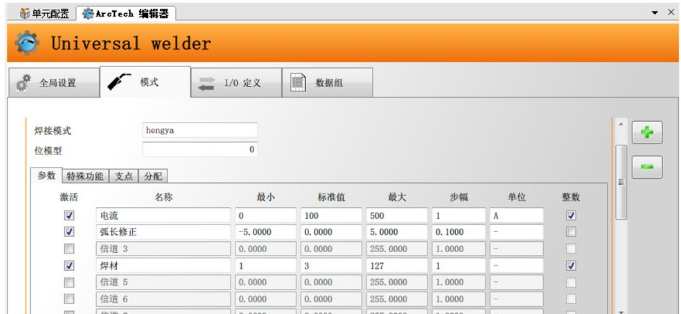
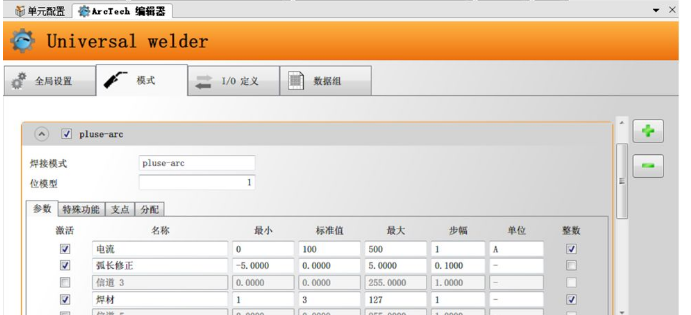
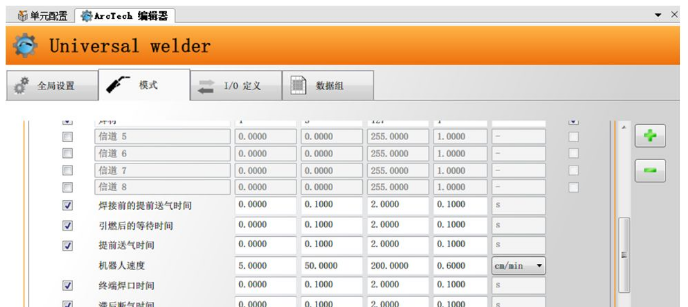
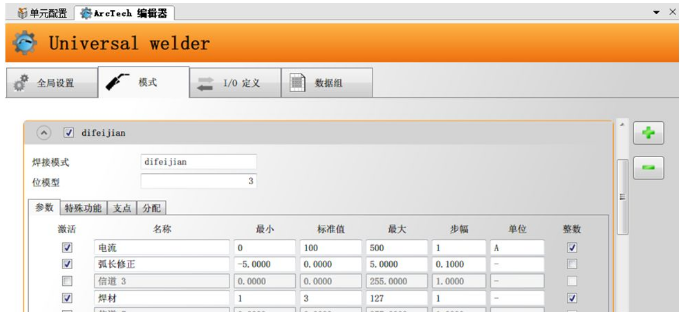
按照下图所示,将数值更改,注意:1、焊接模式不能用中文,只能使用英文字母,因此焊接模式皆使用汉语拼音;2、位模型处的数值一定要按图修改;
恒压模式参数如下图:

点击支点,修改参数:

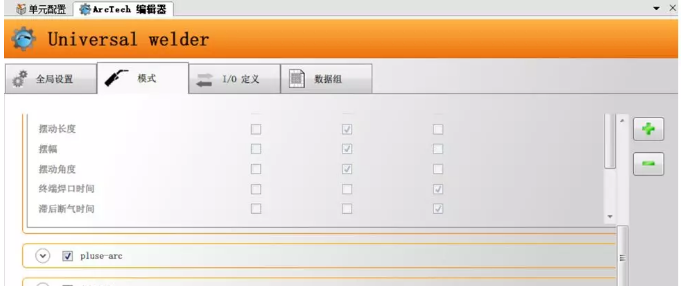
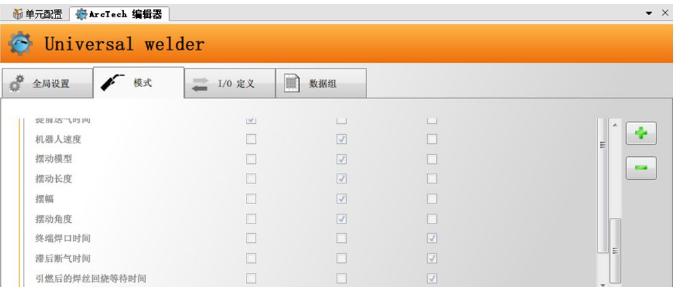
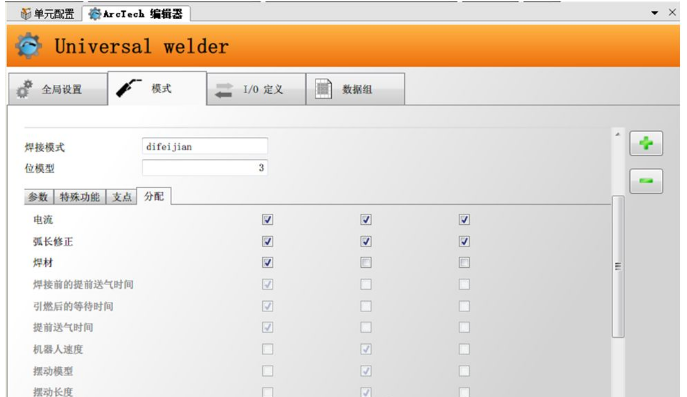
点击分配,修改参数:
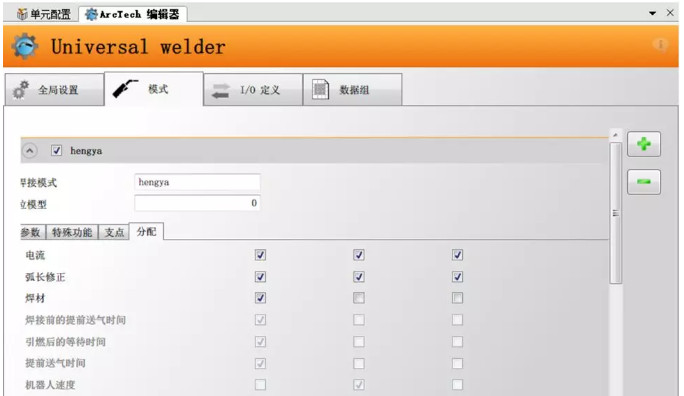
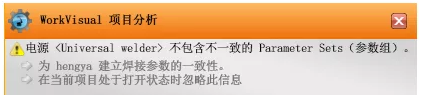
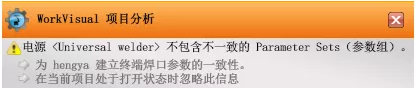
注意:焊材中只勾选第1个,后面两个不勾选,默认为勾选状态,取消勾选时会有提示信息,全部选择第1个选项,提示信息如下图,在修改脉冲以及低飞溅模式的参数时,也会有同样的提示信息,按此点击选择即可;
点击右侧绿色+号,添加脉冲模式;
脉冲模式参数如下图:
点击支点,修改参数:

点击分配,修改参数:

添加低飞溅模式,参数如下:
点击支点,修改参数:

点击分配,修改参数:

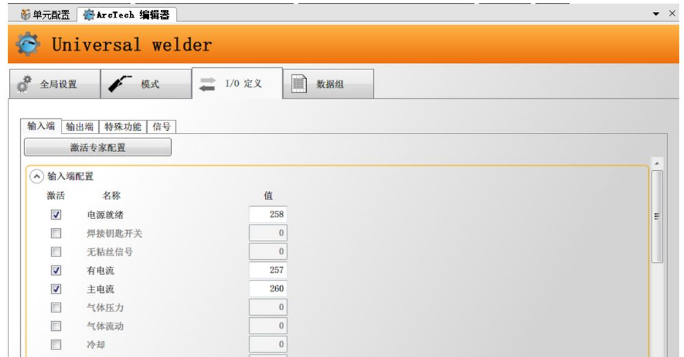
点击I/O定义,修改参数;

修改输入端参数,按照下图勾选参数,并修改:
修改输出端参数:

实时信号输出终端为机器人准备信号。如果没有配置此位信号(DeviceNet通信协议焊机输入终端的第二位),焊机将报告E84错误。这个位配置得好,初始值设置为TRUE。
修改信号参数:

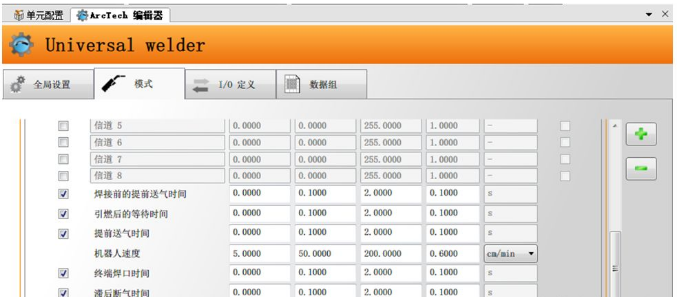
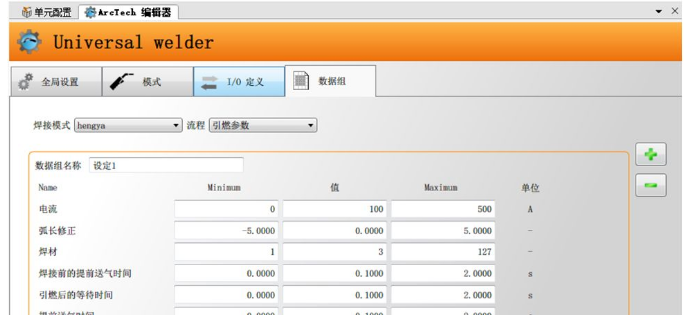
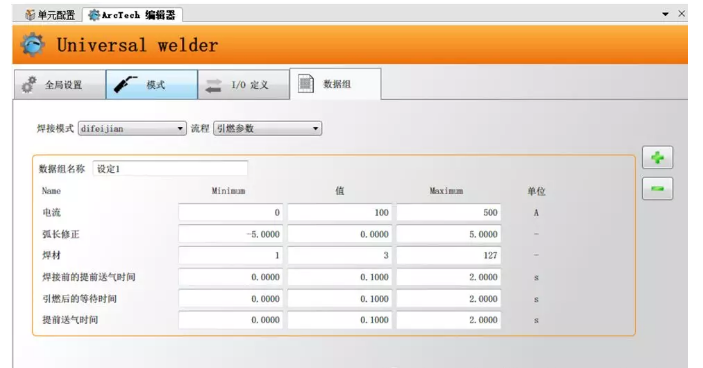
点击数据组,修改参数:
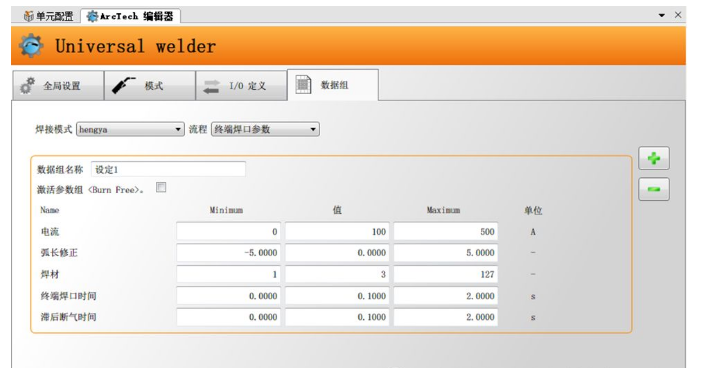
进入数据组后,需要分别修改恒压、脉冲以及低飞溅参数;
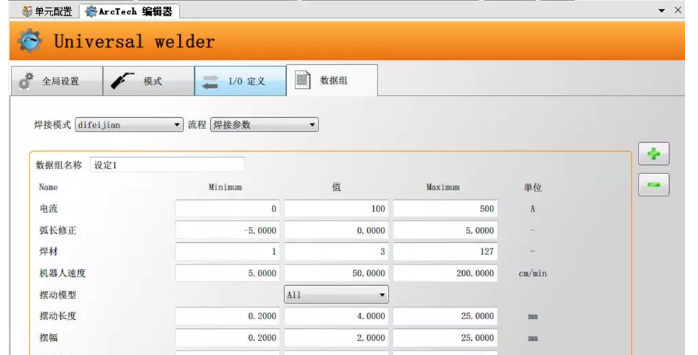
恒压模式需要修改引燃参数、焊接参数以及终端焊口参数,参数如下:

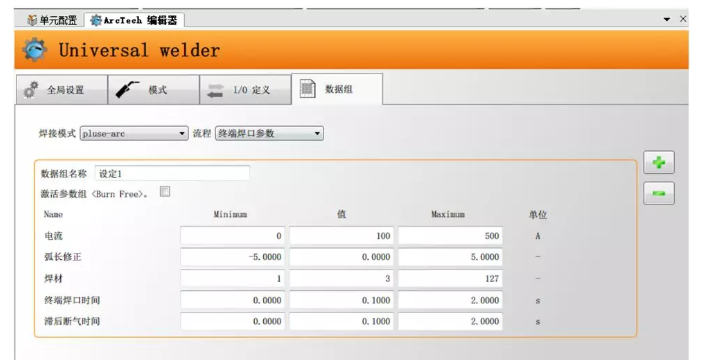
脉冲参数如下:


低飞溅参数如下:

至此,Universal welder弧焊软件包配置完成。
KUKA弧焊项目配置全部完成,将项目编译后即可导入机器人控制器。

在项目导入过程中,机器人教练会提示权限不足,将操作权限改为设备调试器。
