

 联系我们
联系我们

现场应用日渐趋向全自动智能化,
对人机协作的需求更加旺盛,
KUKA LBR iiwa 机器人的身影
也出现在各种适用场合。
有人可能会有疑问:
它与 KR C4 机器人有什么区别?
>> 小 KU 小讲堂时间
KUKA LBR iiwa 机器人与大家常见的 KR C4 机器人有哪些不同?
首先
先说说 KUKA 机器人系统的三大件
● KR C4:
- 机械本体
- 控制柜
- SmartPAD(示教器)

● LBR iiwa:
- 机械本体
- 控制柜
- SmartHMI(示教器)

第二步
从三大件的对比来了解两种机器人的区别
01: 控制柜
● KR C4 机器人
使用 KR C4 控制柜,根据所搭配的机器人型号不同,又分为标准型(standard)、中型(middle)、小型(small size)、紧凑型(compact)、扩展型(extended)等。内部装载Win7+VxWorks系统。

● LBR iiwa 机器人
使用 Sunrise Cabinet 控制柜,不可与KR C4的机器人通用。内部装载SunriseOS+Win7+VxWorks系统。

02
机械本体
●KR C4 机器人
轴数:4~6
有效负载:3~1000Kg
关节上无位置传感器和转矩传感器
外壳材料:铸铁或碳纤

● LBR iiwa 机器人
轴数:7
有效负载:7或14Kg
关节上有位置传感器和转矩传感器
有多种法兰盘供客户选择(供气、供电)
外壳材料:铝

03
SmartPAD、SmartHMI(示教器)
在目前的版本中,KR C4 中的 SmartPAD 和 LBR iiwa 中的 SmartHMI 实际上是同一种类型的示教器,硬件结构相同,软件系统不同,因此两种机器人的示教器可以互相共用。示教器更换后,系统会对软件进行相对应的更新。
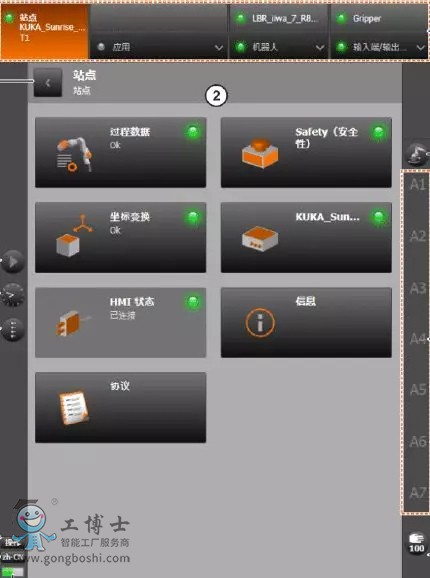
因示教器的软件系统不同,两种机器人的示教器界面区别较大。
● KR C4 示教器界面
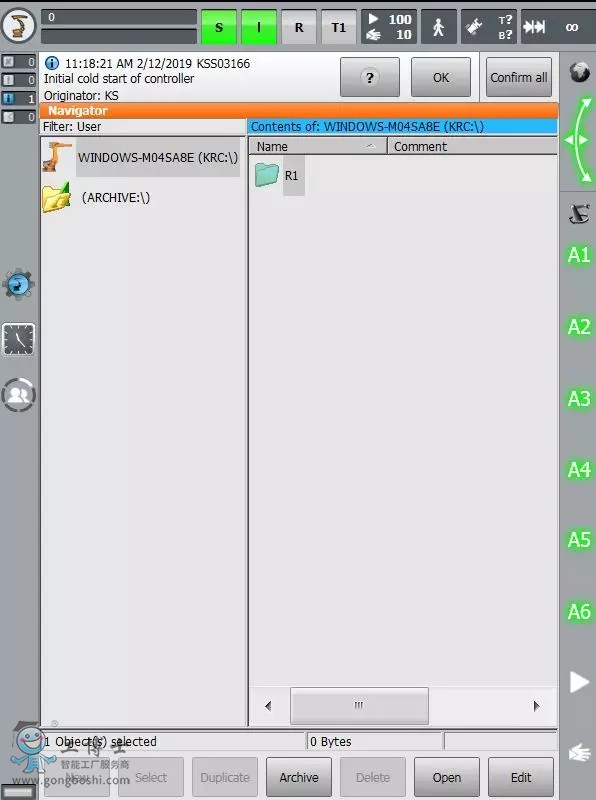
● LBR iiwa 示教器界面
04
编程方式
KR C4 机器人的编程可以直接在示教器上进行,可以使用 workvisual 编程,也可以在 sim pro 上进行仿真。使用的编程语言是 KRL。
LBR iiwa 机器人的编程只能在笔记本电脑上进行,需要在 Sunrise workbench 软件上编好程序再下载到控制器当中。使用 Java 语言编程。示教器只能对机器人进行操作,不能编辑程序。
以上是
针对 KUKA 两种不同系列机器人的简单对比。
希望大家初步能有一个简单直观的了解,
今日份的 KUKA 小讲堂到此结束!
