

 联系我们
联系我们

今天,我们要讲的内容同样具备实操性,那就是“线性单元的Offset校准”,准备好了吗?跟着小 KU 直奔主题吧!
可能出现的问题
正常情况线性单元不需要特别校准。在 WorkVisual 配置好 ROBROOT 运动系统的转换数值即可。
但有时候在使用直线轴测试外部运动系统时,可能工具的 TCP 位置会出现少量的变化,在某些特殊应用要求程序轨迹精度比较高的应用场合,就无法达到客户要求(比如摆动应用等)。
问题分析
理想情况下,机器人的 ROBROOT 坐标系应与线性单元的 FLANGE 坐标系相同。 实际上,通常会出现安装误差,导致这两个坐标系会存在轻微的差异,这意味着使用外部轴运动坐标系时 TCP 的位置会出现偏差。 如果在机器人控制器里安装了 KSS 8.3,则可以通过线性单元的 Offset 校准,来对这些差异进行示教校正。
接下来进入实操环节
在具体的校准操作上,我们同样使用 KUKA KL‐100 配置运动系统来示例。
线性单元的 Offset 校准——标定步骤:
Step1 点击菜单:投入运行→测量→外部运动装置→线性滑轨

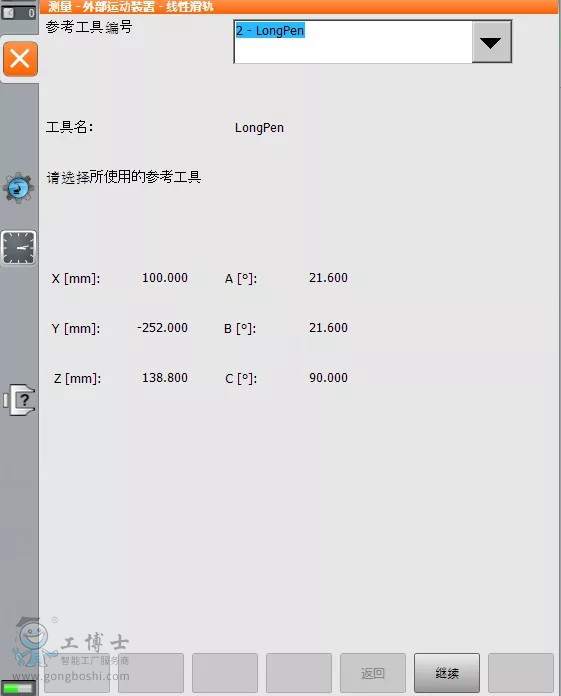
Step2 选好参考工具,点击按钮继续。
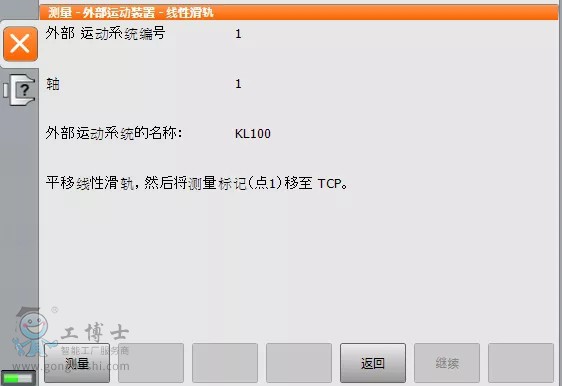
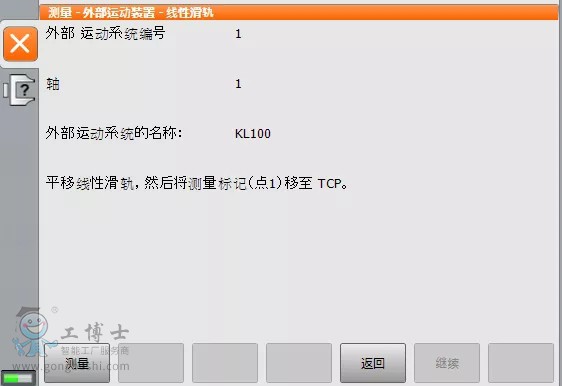
Step3 确定好线性滑轨的移动方向,点击按钮继续。

Step4 移动参考工具TCP到参考点,点击按钮测量。

将测量工具的TCP从3个不同外部轴位置,移向设定的参考点。
机器人控制系统从三个不同的位置中计算出Offset。
Step5 在弹出的窗口,点击按钮是。
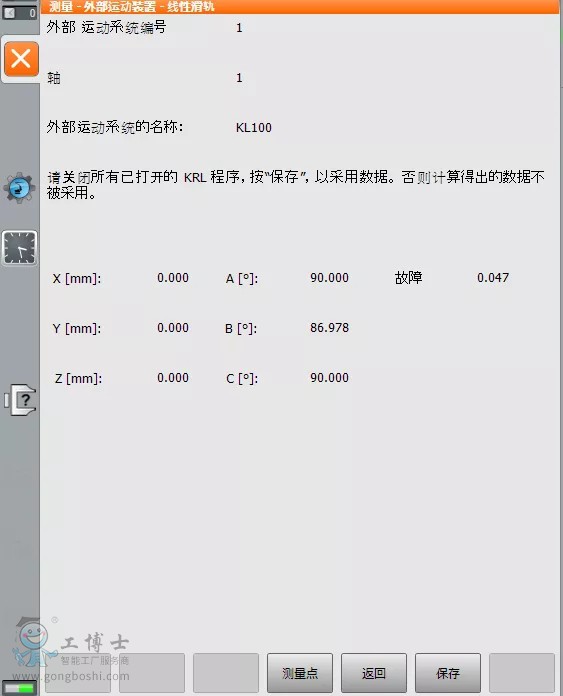
Step6 再重复第4步-第5步两次,就会出现下图的测量结果,点击按钮保存。
同样不能遗漏的是,在进行具体操作前,你要确保四件事:
1. 已在WorkVisual配置好相关外部轴, 将其加载到机器人控制器中。
2. 先前校准过的工具安装在安装法兰上。
3. 没有打开或选择任何程序。
4. T1模式
好了,今天的课程到这里已经全部结束了,还是那句话,有什么不明白的地方,直接联系销售工程师为您解答!
